「大学・高専連携事業基金」事業(共同研究)
掲載日:2024年8月31日
研究課題(令和6年度開始分)
| No. | 研究概要 | 研究代表者 | 連携先 |
| 1 | 共鳴トンネルダイオードを用いたテラヘルツ送信器・受信器に関する研究 | AIスマート工学コース 准教授 浅川 澄人 | 東京都立大学大学院システムデザイン研究科電子情報システム工学域 教授 須原 理彦 |
| 2 | 廃材のリサイクルに向けたHHP法による再生構造材の開発と材料特性の解明 | 医療福祉工学コース 准教授 杉本 聖一 | 東京都立大学大学院システムデザイン研究科機械システム工学域 教授 小林 訓史 |
| 3 | 非侵襲な手指力覚センシングを用いた技術伝承支援システムの開発 | 情報通信工学コース 教授 山本 昇志 | 東京都立大学大学院 システムデザイン研究科機械システム工学域 教授 長谷 和徳 東京都立大学大学院 システムデザイン研究科情報科学域 准教授 下川原 英理 |
| 4 | 粘菌モデルにより構成されるネットワークの耐故障性 | 電気電子工学コース 教授 山本 哲也 | 都立大学大学院 システムデザイン研究科情報科学域 教授 會田 雅樹 |
| 5 | 触覚刺激を用いた自己運動感覚による自動車運転時の速度感の制御 | 医療福祉工学コース 准教授 古屋 友和 | 東京都立大学大学院 人間健康科学研究科ヘルスプロモーションサイエンス学域 教授 樋口 貴広 |
●共鳴トンネルダイオードを用いたテラヘルツ送信器・受信器に関する研究
・実施期間:2024年4月~2025年3月
・研究代表者
【教員】高専 AIスマート工学コース 准教授 浅川 澄人
【学生】高専 創造工学専攻 電気電子工学コース 2年 佐藤 夏音
・研究協力者
【教員】都立大学大学院システムデザイン研究科電子情報システム工学域 教授 須原 理彦
【学生】
都立大学大学院システムデザイン研究科電子情報システム工学域 博士前期課程2年 下川床 聖
都立大学大学院システムデザイン研究科電子情報システム工学域 博士前期課程1年 羽鳥 雅人
研究背景
共鳴トンネルダイオード(RTD)は、量子効果の1つであるトンネル効果を積極的に利用することで300 GHzを超えるテラヘルツ帯において室温動作可能な半導体デバイスであり、6G以降の次世代無線通信の送信器・検波器への応用が期待されている。しかし動作律速の解明や詳細な動作予測が困難であり、送受信応用における極限性能が未解明となっている。
概要
これまで化合物半導体を用いたRTDに関して評価デバイスの作製・測定を通して、非線形な電流電圧特性に関する理論式、RTD内の電子輸送をモデル化した量子輸送モデル、量子輸送モデルを用いた高周波特性評価、といったRTDの極限性能予測のための詳細物理モデルを確立してきた。またRTDとアンテナを集積一体化した送信器・検波器に関しては電磁界解析と等価回路解析を連成した動作予測手法を確立してきている。特に検波器に関しては実際に作製したデバイスの検波特性を精度良く表すことが可能となっている。しかし送信器・検波器の動作予測手法にはRTDの簡易モデルを用いており、RTDの高周波特性を考慮しきれておらず送信器・検波器の詳細な動作予測が明らかになっていない。そのため本研究では、RTDの詳細物理モデルを送信器・検波器の動作予測手法に取り入れ、テラヘルツ帯無線通信で期待されている100 Gbit/sec級の変調動作に対する実現可能性を明らかにすることを目指す。
期待される成果
本研究によりRTDを用いた送信器・検波器の詳細な動作予測が可能となることで、送信器・検波器の極限性能を予測することができる。このことはテラヘルツ帯無線通信システムにおける送信器・検波器のシステム要件(通信距離、送信出力、検波感度、キャリア周波数、通信帯域)を明らかにすることにつながる。また本研究成果で得られる詳細な動作予測は、RTDや集積するアンテナを陽に考慮して解析しているため、応用を見据えたアンテナやRTDの構造、送信器・検波器の周辺構造も含めたデバイス構造への最適設計を可能にすると期待している。
●廃材のリサイクルに向けたHHP法による再生構造材の開発と材料特性の解明
・実施期間:2024年4月~2026年3月
・研究代表者:
【教員】高専 医療福祉工学コース 准教授 杉本 聖一
【学生】高専 創造工学専攻 機械工学コース 1年 海津 一太
・研究協力者:
【教員】都立大学大学院システムデザイン研究科機械システム工学域 教授 小林 訓史
【学生】都立大学大学院システムデザイン研究科機械システム工学域 博士前期課程2年 苅谷 香槻
都立大学大学院システムデザイン研究科機械システム工学域 博士前期課程1年 木下 真衣
都立大学大学院システムデザイン研究科機械システム工学域 博士前期課程1年 大串 晃志郎
研究背景
現在、持続可能な開発目標(SDGs)の観点から木質材料が注目されている。木材はプラスチックとは違いカーボンニュートラルな素材であり、また自然環境下で分解されるため、マイクロプラスチック問題のような生物への悪影響を及ぼさない優れた材料である。特に日本では古来より多くの木材が建築材として利用されてきた。現在の日本家屋の多くが木造住宅であるが、住宅を解体した際に発生する廃木材はそのほとんどがバイオマス燃料等へリサイクルされている。構造材としてのリサイクルは可能であるが,現状では木粉にポリプロピレン等を添加したウッドプラスチックや接着剤を添加して固化させた中密度繊維板( MDF )など,限られた方法しかない。これらの方法では化石燃料由来の樹脂類を添加材として用いるため、廃棄や再リサイクルが困難である。しかしながら、木材単体でのリサイクル構造材は現在のところ存在せず、また,ウッドプラスチックやMDFでは曲げ強度が30~35MPa程度で、木材本来の強度(ヒノキ材で平均約45MPa)を下回っている。
概要
上記の問題に対し研究代表者らは,水熱ホットプレス( HHP )法を用いることによって、木材単体を原料とする高強度でリサイクル性の高い構造材を作製することに成功した。作製した木質構造材は曲げ強度が最大で約70MPaと木材本来の強度を上回る優れた構造材であり、さらに原料が木粉、リグニン、水といった木材に含有する物質のみで構成されているため、この構造材を再リサイクルして再度、木質構造材を作製することも可能である。
一方で、HHP法を用いて木質構造材を作製した事例はこれまでにほとんど報告がなく、どのようなメカニズムで作製した木質構造材の材料特性が変化しているのか、未だ明らかになっていない。そこで本研究では木材以外へのリサイクル範囲拡大を目的に、様々の原料由来のセルロース繊維の特徴とそれにより生成される再生構造材の機械的特性との関係について明らかにする。
期待される成果
研究代表者らはこれまでの研究で廃木材だけでなく、廃紙と廃木材を原料とすることで木質構造材の靭性を改善することに成功している。紙はほぼセルロースのみで構成されることから、木材に限らず、紙や綿製品などセルロース繊維を含有する廃材全般のリサイクルに本作製法を利用できる可能性が示唆されている。種々の廃材には様々な形状、性質のセルロース繊維が含まれており、本研究により原料を構成するセルロース繊維の特徴と生成される木質材の材料特性との関係が明らかになれば、より優れた機械的特性を有する木質材の開発が可能となる。また、紙や綿製品などセルロース繊維を多く含有していれば、あらゆる製品がリサイクル可能な木質構造材としてリサイクルすることができるようになる。
●非侵襲な手指力覚センシングを用いた技術伝承支援システムの開発
・実施期間:2023年4月~2025 年3月
・研究代表者:
【教員】高専 情報通信工学コース 教授 山本 昇志
【学生】高専 創造工学専攻 情報工学コース 2年 菊地 友央
・研究協力者:
【教員】都立大学大学院 システムデザイン研究科機械システム工学域 教授 長谷 和徳
都立大学大学院 システムデザイン研究科情報科学域 准教授 下川原 英理
【学生】都立大学大学院 システムデザイン研究科機械システム工学域 博士前期課程2年 原 優世
研究背景
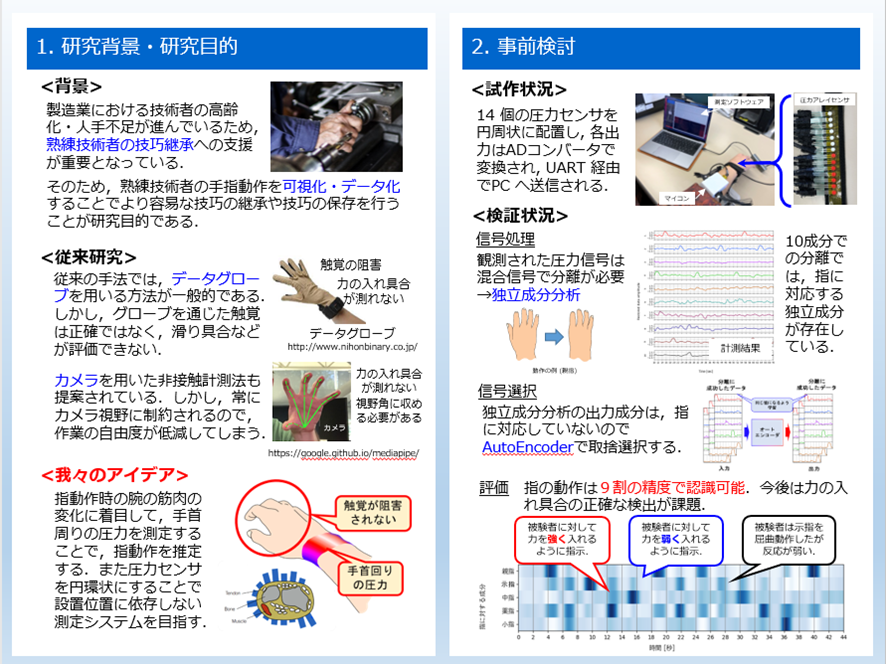
首都・東京の都内総生産は大企業や情報通信関連産業がほとんどを担っているように思われるが、実は中小企業比率が98.8%と非常に多く、小売りやサービス業に次いで製造業が多くを占めている[1]。その製造業においては、55才以上の有業者が占める割合は全体の25.2%と産業別でもかなり高く、少子高齢化の影響を大きく受けている業種でもある。また東京都には多くの伝統工芸も生産されており、これら熟練高齢者の技術を後世に引き継いでいくことが技術者育成を担う当校及び法人での重要な施策であると考える。
技術の伝承を目的とした取り組みは、手順マニュアル作成や動画記録などの形式知を中心とした手法が主である。これら形式知では伝えきれない暗黙知(経験則やノウハウ、身につけたスキルなど)が非常に多く、これらをいかに伝承するかが大きな課題である。中には熟練高齢者を指導者として再雇用して、若年者にノウハウを伝えるOJT(On Job Training)を実施している企業もあるが、財政的な余裕も少ない中小企業では、実施困難な会社も多い。
概要
我々は人間の行動把握の研究を進め、昨年度から手指を足掛かりにして作業における力加減の定量化に挑戦している。我々のアイデアは手作業を阻害せずに複雑な動作を把握するため、腕部分に設置した環状の圧力センサアレイを用いることである。現時点で試作機は完成しており、各指の動作を正確に捉えられる段階である。しかし、力加減まで測るためにはセンサの最適配置や圧力変化信号の厳密な分類が必要であり、人間工学や機械学習の最新技術を適用しなければならない。
そこで本研究では当該分野で高い研究力を有する都立大学と共同で、環状圧力センサアレイによる手指力覚測定システムの開発を目指す。このシステムが実現できれば、製造現場における力加減などの暗黙知を伝承智として活用することが可能となり、東京の製造業存続のための技術伝承問題を解決する手段として期待される。
期待される成果
本研究の目標は、暗黙知の技術伝承に有効な力覚を非侵襲で計測できるシステムの開発であり、中小企業等の熟練作業者の巧みな技やノウハウを定量的に記録することができる。更に、熟練者との差異を定量評価できることで若年者の指導にも有効活用が期待される。
また、本研究のもう一つの目的である学生育成について、本提案のような挑戦的なテーマに取り組むことが、次世代の技術者育成に大いに貢献できると考える。従来、高専では中核技術者として東京都が抱える実践的な課題解決が主であり、国際的に成果が認められる先端研究などに取り組む機会は非常に少なかった。しかし、今後はスタートアップを見据えて、研究力と実践力を兼ね備えた人材が必要不可欠だと考える。そのため、本研究の主目的である大学高専連携や国際学会での発表を行うことで、両能力を兼ね備えた技術者の育成が可能となる。
一方、連携する都立大学においても、研究を実際の問題解決に結び付け、東京の未来構想を創造する人材の育成が必要である。その点、本研究での高専との連携は東京の課題解決(今回は技術伝承)に対して実践的な成果波及を考慮することができる。更に、具体的成果を念頭に置いた研究立案・開発が可能な人材の育成に繋がることが期待される。
●粘菌モデルにより構成されるネットワークの耐故障性
・実施期間:2024年4月~2025年3月
・研究代表者:
【教員】高専 電気電子工学コース 教授 山本 哲也
【学生】高専 創造工学専攻 電気電子工学コース 2年 河戸 幾利
・研究協力者:
【教員】都立大学大学院 システムデザイン研究科情報科学域 教授 會田 雅樹
【学生】都立大学大学院 システムデザイン研究科情報科学域 博士前期課程2年 本間 祐貴
都立大学大学院 システムデザイン研究科情報科学域 博士前期課程2年 須貝 勇也
研究背景
交通網や電力網・通信網など、現代社会に欠かせないインフラのネットワーク設計において、低コストで高い輸送効率を実現することは、重要な目標の一つである。一方で、コスト抑制による冗長性削減により、ネットワークの耐故障性の低下が懸念される。非常時での通信障害や交通麻痺などのリスクを低減するためには、耐故障性も考慮したネットワーク設計が求められる。これまで先行研究では、ネットワーク科学で用いられる様々な中心性指標により耐故障性や耐攻撃性の評価がなされており、指標をもとにした改善方法の評価がされている。それらは、主にネットワーク構造の観点から研究されている。今後は、実際の故障時の輸送量確保の観点からも検討が必要である。
概要
本研究では、Zhangらによって提唱された粘菌中心性を用いて、ネットワークにおけるノードの耐故障性や輸送効率を定量的に評価する手法の有効性を検証する。粘菌中心性とは、手老らによって提案された粘菌モデルを対象ネットワークに適応し、各ノードの輸送量をもとに中心性を評価するものである。これまで、数値シミュレーションにより、粘菌モデルが形成する迂回経路の順に、迂回経路に対応するノードの粘菌中心性が高いことや、除去したノードの粘菌中心性が高いほど、輸送効率が低下することを確認している。このような結果から、粘菌中心性により、ネットワーク全体の耐故障性だけでなく、輸送効率やノードの耐故障性への寄与度を定量評価可能であることが示唆されている。そこで今後は、実際のネットワークに見られるネットワーク構造を対象とし、手法の有効性評価を行なっていく。
期待される成果
本研究の目標は、「ネットワークを形成する個々のノードやリンクに対して、耐故障性・輸送効率への寄与度を、定量評価する手法を確立する」ことである。耐故障性・輸送効率に重要なノードやリンクを定量的に評価できることで、実際のネットワークを設計する際に、輸送効率・耐故障性・コストを考慮したネットワーク設計が容易になることが期待される。また、本研究により定量指標が確立されることで、輸送効率の観点から様々なネットワーク構造の耐故障性を比較することが可能になる。それにより非常時などでの輸送量確保にとって頑健なネットワーク構築のための改善法に関する指針が得られ、その定量的評価・検討が可能になることが期待される。
●触覚刺激を用いた自己運動感覚による自動車運転時の速度感の制御
・実施期間:2024年4月~2026年3月
・研究代表者:
【教員】高専 医療福祉工学コース 准教授 古屋 友和
【学生】高専 創造工学専攻 機械工学コース 1年 新井 慶
・研究協力者:
【教員】都立大学大学院 人間健康科学研究科ヘルスプロモーションサイエンス学域 教授 樋口 貴広
【学生】
都立大学大学院 人間健康科学研究科ヘルスプロモーションサイエンス学域 博士後期課程3年 坂崎 純太郎
都立大学大学院 人間健康科学研究科ヘルスプロモーションサイエンス学域 博士後期課程1年 日吉 尚輝
都立大学大学院 人間健康科学研究科ヘルスプロモーションサイエンス学域 博士後期課程1年 広崎 蒼大
研究背景
自動車は、人々の生活を豊かにしている一方で死亡交通事故という日常でいつでも起こりうる問題がある。その交通死亡事故の原因者によくみられる違反として速度超過があり、走行速度が時速30kmを超えると致死率が高くなることがわかっている。死亡事故を減らすためには、運転者に規定速度を超過させないことが重要であり、ドライバーが知覚する速度感を制御することで速度超過を抑制することを検討する。
概要
速度感の制御にあたり、視覚刺激のみで自己運動感覚を錯覚させるベクションに注目した。自己運動感覚は多感覚的であり、視覚だけでなく音、振動、風などによって促進されることが分かっている。自動車への適用にあたっては、視覚刺激ではドライバーへのノイズとなり危険対象物を見落とす可能性があり、聴覚刺激では警報音の聞き逃しなどのリスクとなるため、触覚刺激を用いることにした。触覚を用いたベクションの研究では、刺激として振動、風、力覚が用いて足や上体に与え、視覚刺激と組み合わせることでベクション効果が強化されることが分かっている。また、運転ゲームへの適用例があり、ドライバーの服を引っ張り視覚刺激と合せることで速度感や没入感を与えているが、服を引っ張るため刺激を与えられる部位は限られ、細かい変化を与えることができない。そこで本研究では、様々な部位に刺激を与えられる振動刺激を用いて、刺激が動いて知覚される触覚の仮現運動により速度感を制御させる。刺激を与える部位は他の研究でも用いられていない上肢を対象にし、車両走行中のオプティカルフローの方向に近い手首から肘、肩へ時間差で刺激を与える。まずは、触覚から知覚する速度感とドライビングシミュレータ上の視覚から知覚する速度感との関係を調べる。その結果を用いて、振動刺激の有無での速度感に変化を与えられるか、また、速度超過抑止効果があるか実験にて検証する。最後に電動車いすを用いて実際に加速度が発生する実環境でも検証する。これにより、速度感を制御できる新しい技術として、自動車以外の乗り物やVR技術にも適用でき、工学的な発展の寄与に貢献できる。
期待される成果
① 振動触覚刺激の仮現運動により触覚から知覚する速度感と、ドライビングシミュレータにより視覚から知覚する速度感の関係を明らかにする。速度感の制御についての仮説は、視覚から知覚する速度より速い速度の触覚刺激を与えると速度感が増し、逆に遅い速度だと速度感が低下すると考えている。視覚と触覚にどの程度の速度差があるとドライバーが知覚する速度感が変化するか明らかにし、速度感の制御方法を確立させる。
② 実際にドライビングシミュレータ上で運転し、成果Ⅰの手法を用いてドライバーの速度超過を抑止できるか検証する。速度超過しやすい道路条件(空いている国道等)にて、振動触覚刺激の有無によるドライバーの運転する速度の違いと危険な対象物に衝突するまで時間(TTC: Time to collision)を測定して効果を検証する。
③ 実車では、ドライビングシミュレータで知覚できない加速度を知覚することができ、実用化に向けて大きく貢献できる。電動車いすを用いた実車評価にてドライビングシミュレータ上と同様の効果が得られるか検証する。そして、実際の自動車や電動車いすへの具体的な適用方法を提案する。
お問合わせ先
東京都公立大学法人 経営企画室 企画財務課
電話 03-5990-5388
Related Posts 関連記事